1、应用场景
受海风、浪、涌和洋流等的影响,舰船会产生横摇、纵摇、艏摇、横荡、纵荡和垂荡六个自由度的运动,会对其上安装的精密设备产生六维非周期性扰动,会对其上的雷达、直升机着舰、人员转运、货物过驳、低轨卫星稳定跟踪、海上手术等产生很大的影响。
传统的稳定平台一般采用串联结构形式,其承载能力小,在跟踪方面存在“过顶”问题。为了补偿船舶的多维摇荡,需要解决面向应用构型创新、运动补偿控制算法等问题。

2、技术优势
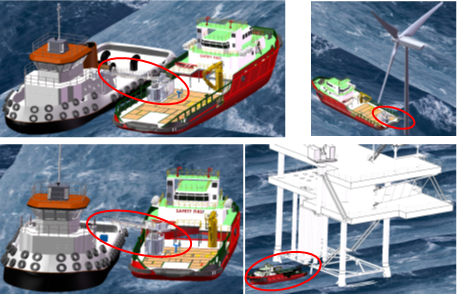
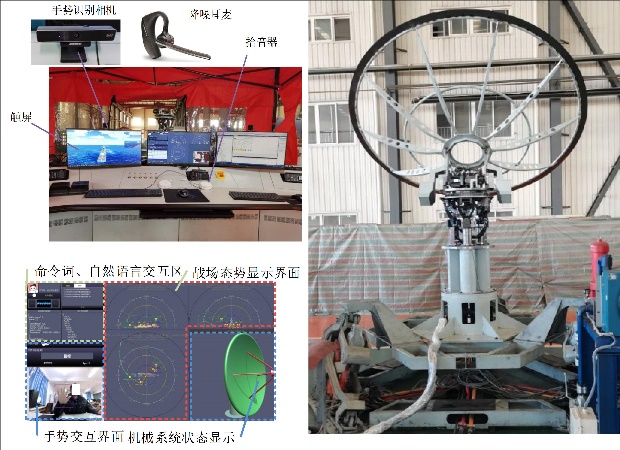
针对海上低轨卫星稳定跟踪指向和无人直升机辅助稳定起降需求,本团队研制了2套串并混联稳定平台系统,构型分别为3-RHUR+RR和3-R(4R)S+PRPR。并联部分实现对船舶摇荡的运动补偿,串联部分实现对低轨卫星的指向、对着舰无人机的快速系留。

低轨卫星稳定跟踪指向可补偿船舶横摇±15°、纵摇±15°,方位±180°、俯仰0~90°,通过串并机构可实现对“过顶”问题的规避。
无人直升机辅助稳定起降平台可补偿船舶横摇±20°、纵摇±20°、升沉±1.2m,串联部分横移3m、腰转360°、伸缩1.4m、腕转±75°。通过串联部分实现对着舰无人机的系留,上平台外形尺寸5.5m×5.5m。
3、解决的关键问题
舰载稳定平台系统由燕山大学赵铁石团队研制,解决了面向应用的构型创新、基于旋量的非惯性系运动学/动力学建模、运动补偿控制算法、船舶运动智能预测、轨迹规划等关键问题。

