1、应用场景
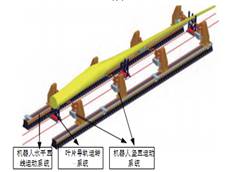
随着我国“双碳”战略的展开,风电行业快速发展。风电装机年复合率达7.49%,2020年全国增加风电数量55GW,但风电叶片生产效率,生产质量和成本逐步成为行业的制约。叶片生产后处理工艺,人工成本高、粉尘污染大、打磨不均匀,效率低,对风电叶片的表面打磨工序自动化需求迫切。燕山大学本团队研发了基于风电叶片的自动打磨机器人。


2、技术优势
国外风力发电行业发展较早,丹麦与德国作为具有代表性的风力发电应用传统国家,其开展了大量风电叶片的制造、打磨、安装技术及工艺的研究,研究成果十分显著。国内风电行业起步发展较晚,以代加工为主,多数工艺为人工操作,其中最具代表性的为华中科技大学丁汉院士团队所提出的基于轨道式风电叶片打磨机器人。

国外系统打磨机器人,成本高,安装施工量大,对现场工况要求较高,后期维护成本高。
本团队研究的打磨机器人,具有自主知识产权,设备无需现场施工安装,具有较好的环境适应性和叶片种类的适应性,可以实现对风电叶片的自动打磨。

3、 解决的关键问题
本团队历时3年,从样机的设计开发到产品市场推广,取得了系列成果,包括国内外专利20余项,获得用户肯定和赞誉,提高了该行业的生产效率,降低了生产成本,减少了粉尘污染。

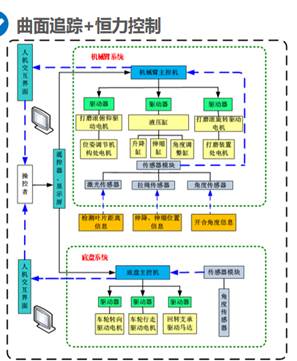
(1) 基于多传感器反馈的大型变曲面实时自动仿行追踪技术。基于激光传感器、超声波传感器等多传感器的反馈,能实现自动测量打磨起止高度,自动快速测量曲面变化情况,控制机械臂运动系统实现快速仿行追踪运动。
(2) 基于浮动机构的打磨头法向面恒压力打磨控制。该几个具有主动柔顺和被动柔顺控制两个功能。基于位移传感器和力传感器的数据反馈和融合算法,实现打磨头和曲面法向力的恒力控制。
(3) 基于视觉传输的远程遥控和故障诊断功能。具有声光报警和安全语音提示功能。可以实现基于视觉信号的远程控制。并根据现场需求,实时修改机器人的运动参数,实时显示机器人当前的关键运行数据。